Pro/E+ADAMS两自由度机械臂的设计与分析(3)
(3)球坐标式机械臂:球坐标式机械臂是一种自由度较多,用途较广的机械臂。它由X、θ、Φ三个方的运动组成。工作范围包括:一个旋转运动;二个旋转运动;二个旋转运动加一个直线运动。
(4)关节型机械臂:关节型机械臂是一种适用于靠近机体操作的传动形式。它有多个关节,像人一样可实现多个自由度,动作也灵活,能适应狭窄的空间进行作业。关节型机械臂一般来说可以拟合操作空间的任意曲线,通过对手臂运动控制、轨迹规划进行复杂的数学计算,实现避开障碍物到达目标点位置。(如图1.3所示)
2 机械臂的总体设计方案
2.1 机械臂的总体设计思想
本文两自由度机械臂的三维模型使用三维制图软件pro/E进行绘制,先使用pro/E建立机械臂的各个零部件模型,然后将各个零件模型虚拟装配,完成完整的两自由度机械臂三维模型。
机械臂的三维模型完成后,使用ADAMS仿真软件对两自由度机械臂模型进行动力学仿真,模型导入ADAMS后,将三维模型的各个零部件进行编辑,定义其材料、密度、质量与转动惯量等性,使其物理特性和实际物理样机的物理特性相同或相近,这样就能更好地模拟实际两自由度机械臂系统,然后在ADAMS中根据机械臂模型定义各个零件间的完整约束和驱动,开始动力学仿真。
动力学仿真完成后,定义好ADAMS中两自由度机械臂系统的输入输出,与Matlab/Simulink仿真模块联合使用,搭建联合仿真系统,实现机械系统与控制系统的联合仿真[4]。
2.2 两自由度机械臂的设计方案
机械臂自由度:机械臂的作用是使末端执行器到达所期望的目标位置处完成相应的作业任务。机械臂的自由度数量与结构形式对末端执行器的灵活度、运动精度以及工作空间有直接的关系[5]。机械臂的自由度包括机械臂运动机构的旋转、伸缩、升降等动作,机械臂的自由度越多,能实现的动作越多,运动越复杂、灵活,实现的功能越多,但其结构也更复杂。本文设计的机械臂是关节式,具有两个关节,用于实现两个自由度的回转运动,末端执行器用于运送物料。其模型简图如图2.1所示。
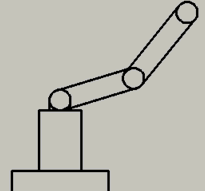
图2.1 两自由度机械臂模型简图
机械臂手臂的设计:本论文设计的机械臂的有两个自由度,即关节1和关节2的旋转运动,两个关节回转中心的距离l=500mm,手臂的旋转通过关节1处的旋转动作实现,关节1的旋转动作通过电机控制蜗杆带动蜗轮实现。
机械臂手腕的设计:机械臂的末端执行器关节回转中心到末端点的长度l1=500mm,相对手臂转动运送物料,手腕处的关节2通过旋转动作以满足要求,其旋转动作通过电机控制蜗杆带动蜗轮实现。
机械臂的传动方案设计:一般伺服电机的输出转速在1000r/min~10000r/min,但是关节需带动的负载的转速低,负载力矩大。使用圆柱齿轮实现一级减速,使用蜗杆蜗轮实现二级减速,电机与负载之间的转速和转矩的匹配。
机械臂的控制方案:为了使系统的能正确执行动作实现功能,使用PD位置控制进行校正控制。
2.3 机械臂的用途与设计参数
用途:两自由度机械臂用于自动运送物料。
设计技术参数:1、承重:100kg
2、自由度:两个自由度
3、基本形式:关节式