- 上一篇:温水换热器的设计开题报告
- 下一篇:羟基苯甲醚生产车间工艺设计开题报告
(1)履带式
履带式行驶机构最早出现在坦克和装甲车上,后来出现在某些地面行驶的机 器人上,它具有良好的稳定性能、越障性能和较长的使用寿命,适合在崎岖的地面上行驶,履带式行驶机构曾被认为是替代轮式结构的一种很好的选择。但是,其沉重的履带和繁多的驱动轮使得整体机构笨重不堪,消耗的功率也相对较大。
(2)腿式
腿式行驶机构因其出色的越野能力,曾经得到过机器人专家的广泛重视,在其开发和研制上投入了大量的时间和精力,也取得了较大的成果。从移动的方式上来看,腿式移动机器人可以分为两种:动态行走机器人和静态行走机器人,也可根据腿的数量进行分类。腿式机器人特别是优尔腿机器人有较强的越野能力,但结构比较复杂,而且行走速度较慢。
(3)轮式
轮式机器人具有运动速度快的优点,只是越野性能不太强。但随着各种各样轮子底盘的出现,并可以和腿式机器人相媲美,于是人们对移动机器人行驶机构研究的重心转移到轮式机构上来。在移动机器人行驶机构的研究方面,很难再找到开发腿式结构的了,几乎都在进行轮式结构的研究。
轮式机器人适合于条件较好的路面。轮式移动机构运动平稳,自动操纵简单,最适合平地行走,在无人工厂中,常用来搬运零部件或做其他工作,应用最广泛。所以本课题采用轮式。
普通的轮式移动机构一般有三个轮、四个轮或优尔个轮,其转向装置的结构通常有两种方式:
(1)铰轴转向式:转向轮装在转向铰轴上,转向电机通过减速器和机械连杆机构控制铰轴,从而控制转向轮的转向。
(2)差速转向式:在轮式移动机器人中,差动转向式控制较复杂,但精度较高,在机器人的左、右轮上分别装上两个独立的驱动电机,通过控制左右轮的速度比实现车体的转向,在这种情况下,非驱动轮应为自由轮。
四轮的稳定性好,承载能力较大,但结构较复杂。三轮移动机构结构最简单,控制最方便。三点确定一个平面,三轮支撑理论上是稳定的,采用三轮移动机构的机器人来说,重心都比较低,载荷稳定且中心位置基本不发生变化,所以三轮移动机构能满足要求。前轮为转向轮,由一驱动电机驱动,后两轮为驱动轮,固定不可转向,后两轮也是由一驱动电机驱动,结构如图2。
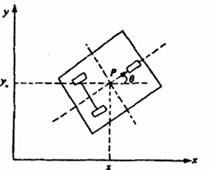
图2 移动机器人的行驶机构简图
3.4.2移动机器人总体机械结构设计
图3 移动机器人总体机械结构
3.4.3移动机器人感知系统
对移动机器人而言,机器人视觉系统正如入的眼睛一样,是机器入感知局部环境的重要“感官"。能否正确、实时地处理视觉信息直接关系到机器人行驶速度、跟踪效果及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性作用其处理技术是移动机器人研究中最关键的技术之一。视觉传感器方式具有信息量大、信息完整等优点,使得通过视觉传感器准确获取信息成为轮式移动机器人的主要发展方向之一。视觉导航主要完成障碍物和陆标的探测及识别,这种能力将不仅使机器人能感知二文环境中物体的几何信息,如形状、位置、姿态等信息, 而且能对它们进行描述、存储、识别与理解。过去,由于图像采集及处理的硬件设备运行速度低,利用视觉系统感知环境导引机器人进行跟踪受到了很大限制。近年来,随着科学技术的迅速发展,视频设备及计算机硬件运行速度得到了很大提高,越来越多的研究者投入到视觉导航领域中。因此,研究视觉导航技术已成为移动机器人导航研究的趋势。但是,如何让机器人具有类似于人类的自主视觉能力,如何提高机器人运动中的控制精度,仍然是需要长期解决的问题。视觉系统是移动机器人视觉导航进行路径跟踪的一个重要组成部分。本文所研究的轮式移动机器人的视觉系统主要由图像采集、图像处理、图像辨识三个模块构成。其中图像采集模块用来获取数字图像;图像处理模块是对提取到的外界路面信息进行处理,得到需要的特征信息;图像辨识模块是在具有特征信息的图像中辨识出期望跟踪路径的直线斜率、曲线曲率等一些信息用于对机器人的反馈控制。立体视觉是仿照人类利用双目视觉线感知距离的方法,实现对三文信息的感知,在实现上采用基于三角测量的方法,利用两个或多个摄像机对同一景物从不同位置成像,从而从视差中恢复距离信息。一个完整的机器人立体视觉系统包括:图像获取、摄像机标定、特征提取、立体匹配、三文信息恢复及后处理5个部分。
-
互联网背景下德邦公司物流服务方式开题报告
-
Top-1250平板上悬式刮刀卸料离心机开题报告
-
平面磨削台式砂带机设计开题报告
-
轮-履变结构的轮椅式服务...
-
中国明星真人秀节目的制作模式开题报告
-
新型箱式盘架式干燥器的设计开题报告
-
手推式道路清洁车设计开题报告
现代简约美式风格在室内家装中的运用
g-C3N4光催化剂的制备和光催化性能研究
江苏省某高中学生体质现状的调查研究
NFC协议物理层的软件实现+文献综述
巴金《激流三部曲》高觉新的悲剧命运
高警觉工作人群的元情绪...
浅析中国古代宗法制度
中国传统元素在游戏角色...
上市公司股权结构对经营绩效的影响研究
C++最短路径算法研究和程序设计