- 上一篇:FPGA测试系统中的数据采集存储和通信模块的设计
- 下一篇:基于嵌入式系统的LED显示控制接口设计
现在的雷达目标模拟器可用于在实验室中进行设备测试,也可作为检测设备用于不同的环境中,大大节约了成本。
在军事领域中,利用雷达可以对普通飞机飞行空间至卫星轨道空间期间的目标进行检测定位[14],我们称之为临近空间目标。无论是现在还是未来,海陆空三方面其中空中目标的探测始终有着重要的战略地位,已经愈发引起人们的重视。随着科技的发展,空中目标的速度越来越快,包括超高速无人驾驶飞机,高速洲际导弹,轨道飞行器等[15],大气层内的航空器已经达到10倍音速的滑翔速度,大气层外的目标则速度更高,流星进入大气层的速度在最大能够达到72公里每秒。因为这些目标的超高运动速度以及复杂的运动轨迹,雷达目标检测技术显得更加具有挑战性[16]。近年来,空中目标已经成为了军事领域中一个新的研究热点,超高速运动目标也是现代雷达目标检测中遇到的新情况[17]。传统脉冲多普勒雷达要探测出普通低速目标,通过匹配滤波、脉冲相干积累等方法即可,但是对于超高速目标,传统的方法已经不再适用,匹配滤波后不能有效的积累,所以必须要研究得到适用于超高速目标检测的新方法。
1.2 国内外研究现状
1.3 论文内容介绍与章节安排
本文对超高速运动目标的探测展开了讨论和研究,分为以下两个部分:第一部分建立了超高速目标的回波模型并且分析其回波特性;第二部分针对超高速目标回波的现象,提出了一种将宽带分割为窄带的方法进行处理。具体内容安排如下:
第一章讨论了雷达模拟的便捷性以及超高速目标检测的研究背景,表明了本文研究的必要性,同时例举了一些雷达模拟器,给出了超高速运动目标探测的一些研究的成果,最后是本文章节内容的安排。
第二章对超高速运动目标回波进行建模,具体分析了超高速目标回波跨越距离门、多普勒色散以及目标回波发生伸缩的现象。
第三章针对超高速目标检测跨越距离门以及多普勒色散现象的提出了一种将宽带分割为窄带的解决方法,给出了分割方法以及分析步骤并通过仿真检验其有效性。
2 超高速运动目标回波
2.1 超高速目标回波模型
假定超高速运动目标与雷达的距离为 ,并且以速度v做匀速直线运动,雷达和目标的位置关系如图2.1所示。我们建立以雷达位置为原点的直角坐标系,假设超高速运动目标的坐标为( , , ),超高速目标与雷达连线方向夹角为 向雷达飞行。 在目标飞行方向上的投影 。
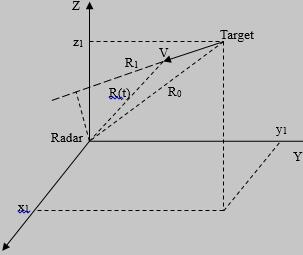
图2.1 目标与雷达的几何关系
由余弦定理可以得到,雷达与超高速运动目标的随时间变化的距离为:
(2.1)
其中 是超高速运动目标的切向速度分量,而 是超高速运动目标的径向速度分量。假设雷达发射的脉冲信号是 ,目标回波返回到达将延迟一段时间 ,我们将接收到的目标回波形式记为 。
-
Modbus工业控制嵌入式协议转换器设计+程序
-
电容测量中差分转单输出...
-
MATLAB动车组转向架轴承故障的分析与诊断仿真
-
数字阵列雷达的多通道中频信号产生FPGA实现
-
AD603的30MHz中频放大器设计与应用
-
AD9361+FPGA宽带零中频收发信机设计与实现
-
ZD6转辙机控制电路实验台设计
江苏省某高中学生体质现状的调查研究
浅析中国古代宗法制度
上市公司股权结构对经营绩效的影响研究
g-C3N4光催化剂的制备和光催化性能研究
现代简约美式风格在室内家装中的运用
高警觉工作人群的元情绪...
巴金《激流三部曲》高觉新的悲剧命运
NFC协议物理层的软件实现+文献综述
中国传统元素在游戏角色...
C++最短路径算法研究和程序设计