- 上一篇:线性时滞系统的多目标控制器设计与仿真
- 下一篇:Matlab立体仓库任务优化调度算法的研究
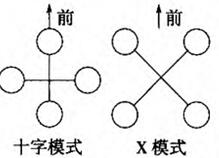
图2-1 四旋翼飞行器飞行模式
当飞行器中的螺旋桨高速转动时,根据牛顿第三定律,机体会受到反扭矩的作用,如果四个电机的转动方向相同,飞行器将原地自转。为了让转动时取得平衡,两条对角线上的两对推进器的转动方向相反,即前后一对顺时针转动,左右的一对逆时针转动。要实现图2-2(a) 描述了四旋翼飞行器的悬浮状态,所有的推进器都要达到同样的转动速度。随着转动速度的增加,当四个推进器所产生的升力等于或大于飞行器的重力时,四旋翼飞行器就能在空中稳定的悬浮或上升。为了能够如图2-2(b)那样地向前(向后)飞行,后面的推进器(前面的推进器)必须得转动得更快而与其相对的推进器必须转动得慢一点,这种情形我们称之为俯仰。同样的原理也适用于如图2-2(c)中的那样向右(向左)的运动,这种情形我们称之为翻滚。图2-2(d)描述了逆时针的偏航转动,前面和后面的推进器会转动得更快一点而左边和右边的推进器会转动得慢一点,这样飞行器上就有了扭矩从而开始自转。顺时针的偏航转动也是按照同样的原理进行的[22]。
-
PLC四层电梯控制系统仿真设计+梯形图
-
Matlab可搭载手机的外设式飞行器控制方法设计
-
倾转旋翼机的建模及基于...
-
LQR高超声速飞行器的模型...
-
激光测距仪的无人飞行器...
-
四层PLC电梯控制系统设计+梯形图
-
PLC四大车联动智能无线传输系统设计
高警觉工作人群的元情绪...
中国传统元素在游戏角色...
g-C3N4光催化剂的制备和光催化性能研究
现代简约美式风格在室内家装中的运用
C++最短路径算法研究和程序设计
浅析中国古代宗法制度
江苏省某高中学生体质现状的调查研究
NFC协议物理层的软件实现+文献综述
上市公司股权结构对经营绩效的影响研究
巴金《激流三部曲》高觉新的悲剧命运