自动喷漆机器人小臂系统设计(3)
直接示教,即通俗说法的手把手示教,由工人通过示教盒为机器人下达指令,是机器人按照工人的意愿来进行工作,对轨迹位置点和速度等信息进行记录,然后用键盘来编辑工作程序,存储在数据区。机器人会按照工人编辑的顺序逐条读取数据区的指令,进行解读然后运算并作出与之相对应的动作。
离线示教与直接示教不同,机器人是处于离线状态,所以在读取数据区编辑的指令后并不会做出实际的动作。而是使用在计算机内部存储的工件模型,让机器人对模型进行模拟喷漆,来确定机器人的运动是否可以像预期的那样完成所要求的喷漆作业[9]。
1.5 本文的主要研究内容
本文的主要研究内容是设计一个满足任务书中要求的喷漆机器人小臂系统,具体步骤如下:(1)与小组其他成员讨论并确定总体方案;(2)对小臂系统结构进行设计;(3)画部件图、零件图和总装图;(4)书写设计说明书。
本课题对喷漆机器人小臂的设计包括自由度、小臂结构、坐标形式、传动系统和平衡系统方案的选择与确定。准备工作和相关步骤如下:
(1)通过上网和图书馆阅读查阅喷漆机器人相关资料,补充手臂型机器人的基础知识,并了解国内外喷漆机器人的研究历史和发展现状以及未来前景如何;
(2)为了满足任务书的要求,先通过讨论确定最优的整体设计方案,确定小臂系统的结构、坐标形式、传动系统和平衡系统方案;
(3)通过计算确定小臂臂长、传动系统和平衡方式;
(4)通过计算选择电机,最后绘制部件图、零件图和总装图。
2 喷漆机器人总体方案
根据任务书的内容,此次课题所要设计的喷漆机器人结构系统需要满足以下要求:具有5个自由度;由步进电机驱动;负载2.5㎏;机身运动范围±120°,大臂前俯25°,后仰10°。小臂俯仰±30°,腕转110°,腕摆110°;工作空间2400×1100×1000mm³;喷枪最大工作速度0.9m/s;开环连续轨迹控制;重复定位精度为±3-±5mm;手把手PC示教。
2.1 坐标形式确定
常见的机器人坐标形式包含以下几种:
(1)圆柱坐标型机器人:可以通过2个移动的和一个转动的关节来改变手部空间位置,如图2-1所示。特点是结构比较简单,计算方便,占用空间较大,常作为搬运机器人。
(2)直角坐标型机器人:可以通过移动3个轴线互相垂直的关节来改变手部空间位置,如图2-2所示。特点是精度高,轨迹容易求解,但是占据空间十分庞大。
(3)关节型机器人:通过3个可以转动的关节来模拟人体的手臂的动作,如图2-3所示。特点是占用空间小,工作空间大,动作灵活。
(4)球坐标型机器人:通过2个转动和1个可以移动的关节来改变手部空间位置,如图2-4所示。特点是结构紧凑,占地空间小,但是目前应用比较少[10]。
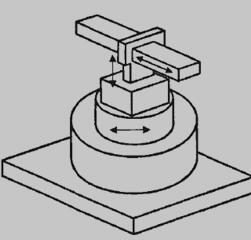
图2-1圆柱坐标型机器人 图2-2直角坐标型机器人
图2-3关节型机器人 图2-4球坐标型机器人
对比以上的4种类型的机器人,参考任务书中所给出的相关要求,本课题要求设计的喷漆机器人工作空间大,而且负载较小,并且需要动作比较灵活,因此经过和组内其他成员进行讨论论证和综合考虑,决定采用关节型机器人作为本课题喷漆机器人的设计类型。