六自由度工业机器人机构原理与设计(2)
1.1 课题背景及研究的意义
机械制造行业,在各项行业中算是属于工作强度比较大劳动量也很大的行业,并且有的机械产品的生产环境对生产者就是操作的工人会产生一定的危害。长期在生产线上劳动的工人除了工作繁重,还可能面临这些潜在的危险:热处理环节的高温高压、飞速旋转的电机、易燃易爆物品等等。这些都可能危害劳动工人的生命健康。同时这些潜在的问题不仅可能对工人身体造成伤害,还会因为工人的不适耽误生产进程,以及影响产品的质量。而工业机器人是面向工业多个领域的多关节机械手,或者是多自由度的机器装置。它可以忽略人体所不能承受的环境问题,并且还能自动按照程序有条不紊的持续进行工作,是靠自身动力和控制能力来实现功能的一种比较智能的机器。它的出现,不仅代替了部分危险环境下的工人,同时还能提高生产效率,稳定、提高了产品质量。换句话说,工业机器人就是用机器代替了工人的人工劳动,重复的不知疲劳的把工件由某个地方移动到指定的某个工作位置,或者按照要求允许工人可以操纵工业机器人对产品进行加工。
1.2国内外的现状以及发展趋势
2 工业机器人结构设计
本次毕业设计的目的主要是在设计出工业搬运机器人的主要的运动机构,课题要求设计工业机器人的技术参数为:6自由度,承载20kg。
主要研究内容有:
(1)机器人主要运动关节的功率、扭矩计算,以及配套选用的电机、减速器等等。
(2)完成机械传动方案和机械结构设计,要求绘制标准工程图5张(包含一张总装配图)。
(3)对设计的结构进行强度特性分析。
机器人主要机构设计包括机械本体形状的设计、传动机构的设计以及电机减速器的选用等。优尔自由度工业机器人的结构大致可以分成:腰部、肩关节、肘关节、大臂、小臂、腕关节、手爪。各部分之间选择采用转动关节。为了能实现精密控制,采用交流伺服电机驱动。为了实现大传动比,采用谐波减速器传动,同时谐波减速器使结构更紧凑。机器人结构简图见图2.1。
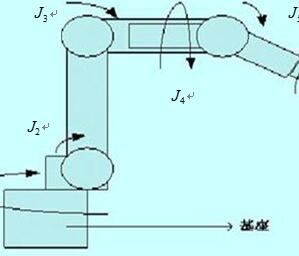
图2.1 机器人结构简图
机器人主要设计参数如下所示:
自由度:6 负载:20kg
各轴转动范围及转动速率如下表所示。
表2.1 各轴转动范围及转动速率
关节
转动范围 300° 240° 270° 360° 270° 360°
转动速率 150°/s 160°/s 160°/s 200°/s 200°/s 360°/s
工业机器人一般只有这三种驱动方式:气压驱动、液压驱动和电机驱动。它们各自的优缺点如下所示。
(1)气压驱动: 气压驱动是以压缩空气来驱动操作机的。其优点是空气是随处可得的,来源方便,使用后可以直接排入空气中,污染很小,符合现代绿色生产的新型理念。而且气压驱动结构比较简单,成本低廉。但也有缺点:空气的压缩性比较大,这样必然会导致工作时压缩速度的不稳定。除此以外,因为一般气源压力大约只有6kPa,压力相对比较小,所以使用气压驱动的工业机器人负载比较小,一般只有几十牛顿。
(2)液压驱动:液压驱动的压力一般为70kPa左右,比气动驱动的压力要高很多,因此不用担心使用液压驱动的工业机器人的负载能力,其负载能力一般甚至可以达到上千牛顿。并且这类工业机器人结构紧凑,传动平稳。但由于要对液体进行压缩处理,所以要求密封条件较高,并且不宜在高温或低温环境下工作。因此液压驱动的使用范围比较小。