数控机床上下料机械手的设计+PLC梯形图(3)
机械手的控制系统是通过电机来控制机械手每个部件的行动,同时会接受传感器的反馈,继而形成闭环控制回路,如图1.1。控制系统通常由单片机或DSP构成,也有使用PLC,通过编程的程序输入,来完成动作的设计。
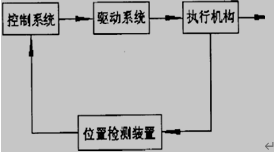
图1.1 机械手组成方框图
机械手的位置检测装置能控制执行机构的运动位置,常由各种传感器或者磁石构成。它能及时感知机械手各部位的坐标情况,并且反馈给控制中心,接着由控制系统进行调整,使得执行机构完成任务,将工件准确送达指定位置。
自动上下料机械手系统组成简图如图1.2 所示。这套系统先通过相机获取工件的图片,经A/D 的信号转换,通过数据线传至图像采集卡,最后进行处理,存储在PC中。据计算机处理,得到工件的坐标值,从而指引机械手完成工件的自动上下料。
图1.2 自动上下料机械手组成简图
1.3 国内外在气动机械手领域的研究现状
1.4 课题背景与研究意义
如前文所述,气动机械手的研究已经是当下一个热门的领域。现如今,随着社会经济的发展,人力的成本越来越高,许多中小企业已无力承担高昂的费用,工业产业的升级迫不及待。工业机器人是用于模拟人类来完成任务的设备,与传统的人力相比,它只需要极少部分人去操作,并且动作精准完成度高,可以长时间重复操作。同样,气动上下料机械手也有其不可替代的优越性。
本课题便旨在设计一个能完成特定需求的专用气动机械手,来深入机械手在工业实际中的应用。对于通用型机械手来说,它并不能完成所有特定的任务与工作,因而专用机械手应运而生。现在市场上已经有许多专门生产气动机械手元件的公司,比如德国FESTO,亚德客公司等等。因此,只需要知道气动机械手的运行参数,便可以方便地选择气动元件。但是,对于专用机械手来说,还需要设计专门的连接件来装配购买的气动元件。论文网
所以,本课题亟待解决的问题如下:
①根据设计要求,设计气动机械手的运行动作。
②完成气动回路的设计
③完成气动元件的尺寸设计,校核与选型。
④完成气动机械手的连接件的设计以及图纸绘画。
⑤完成PLC的选型与程序设计。
2 总体技术方案和气动回路设计
2.1数控机床上下料机械手的设计要求
①工件尺寸:直径Ф40mm,高度80mm,工件重量:1kg
②上料要求:将毛坯库中的毛坯搬运至机床的卡盘处,且工件进入卡盘的深度为20mm。
③下料要求:将加工完毕的工件从机床的卡盘处搬运至成品库中。
④工件在毛坯库及成品库中的姿态为垂直放置,在机床上的夹紧姿态为水平放置。
详细的空间位置要求见下图2.1。
图2.1 数控机床上下料机械手的整体空间位置要求
2.2 气动结构设计
气动系统的设计主要是回路设计。电.气程序控制系统的主要特点是动作准确、响应快。根据课题报告要求,机械手需要在指定的地点取料,然后移动至卡盘,在工件加工完成后,从卡盘取料,在运送至放料的地方,最后机械手回到起始位置。
根据行程以及机械手的使用要求,机械手至少需要有三个自由度,完成水平,垂直以及手腕的回转运动,且需要有夹紧装置来上下料。
机械手的控制要求为:手动启动,机械手按工作程序自动执行完成工作循环。执行元件为四个气缸,分别为大臂无杆气缸,小臂直线气缸,手腕回转气缸和手部夹紧气缸,即实现机械手的水平运动,垂直运动,手腕回转运动和手部夹紧放松动作。