- 上一篇:Atmega128单片机压力测量的数字式液位传感器设计+源程序
- 下一篇:ATmega128单片机的压力标定系统软硬件设计
自动焊锡系统机械机构主要包括几大部分,分别是X,Y,Z轴的机架,工作台,还有焊枪组件和出丝机构等。经过设计计算以及利用Pro/engineer完成最终装配体。
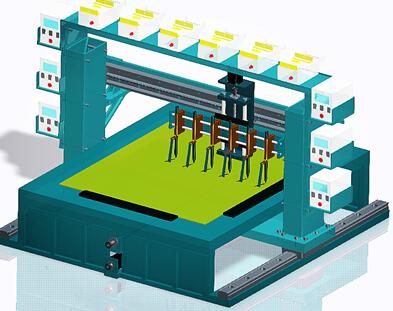
图2.1 自动焊锡系统的总装配图
2.2 自动焊锡系统的X,Y,Z轴的机械机构设计
已知条件:
Z轴负载物体重量 =43.6KG=436N,X轴零件重量负载为86.35kg,Y轴零件重量负载为734.01kg,Z轴的最大行程 =284mm,X轴最大行程 =1620mm,
Y轴最大行程 =1640mm,快速进给速度均为 =10m/min,定位精度为20um/300mm,全行程25um,重复定位精度为10um,要求寿命为20000小时
2.2.1 X,Y,Z轴滚珠丝杠基本设计数据计算
1)导程计算
-工作台最高移动速度
-电机最高转速;
i -传动比
电机与丝杠间采用联轴器连接,i=1
由已知条件得 =10m/min,
初步设定电机最高转速 =2000r/min
代入公式算得 0.005m
初查《滚珠丝杠设计与选型》取 5mm
因X,Y,Z三轴要求移动速度一致,因此导程初查值一致,均为 5mm
2)确定当量转速与当量载荷
(1)工作情况下
丝杠转速
已知 =10m/min, =5mm,i=1
X,Y,Z三轴参数一致,结果相同
(2)当量转速计算
当量转速 /100+ /100+ /100+ /100
t-工作时间比例
已知 2000r/min, =100%
数据代入得 1667*100/100=2000r/min
X,Y,Z三轴参数一致,结果相同
(3)当量载荷计算
Z轴:
X轴:
Y轴
由已知条件代入公式得到
X轴 Y轴 Z轴
127N 1079N 436N
127N 1079N 436N
3)初选滚珠丝杠副
由动载荷计算公式知
-负荷系数
-使用寿命
查《滚珠丝杠设计与选型》表3.8.1,得 =1.1
已知 =436N, =20000h
X轴 Y轴 Z轴
127N 1079N 436N
20000h 20000h 20000h
1870N 15890N 6421N
4)计算所需最小螺纹底径
(1)计算最大轴向变形量
① (1/3—1/4)重复定位精度 ② (1/4—1/5 )定位精度
-最大轴向变形量
已知重复定位精度10 ,定位精度25
① =3 ② =6
取两种结果最小值 =3
X,Y,Z三轴参数一致,结果相同
(2)估算最小螺纹底径
因为要求进行预拉伸校核
在选取双端固定的支持形式的情况下
:最小螺纹底径mm
L-两端固定支撑的距离
-静摩擦力, =
X轴 Y轴 Z轴
两端支撑的距离 1700mm 1750mm 359mm
载荷 127N 1079N 436N
摩擦系数 0.15 0.15 0.15
最小螺纹底径
4.1mm 11.98mm 3.4mm
5)滚珠丝杠副的型号确认
由计算出的 , , 结合实际机床尺寸以及精度需求在《滚珠丝杠 设计与选型》中选取相应规格的滚珠丝杠副具体参数
-
Protel99SE多功能充电宝的设计+PCB电路图
-
STC15W404AS单片机太阳能自动浇花器的设计
-
110KV变电站综合自动化系统设计
-
机舱自动化数据采集PLC程序设计+梯形图
-
PLC火炮自动补弹装置控制...
-
基于Arduino的自动浇花系统设计+电路图+程序
-
PLC自动换刀控制系统设计+梯形图
NFC协议物理层的软件实现+文献综述
g-C3N4光催化剂的制备和光催化性能研究
C++最短路径算法研究和程序设计
浅析中国古代宗法制度
上市公司股权结构对经营绩效的影响研究
巴金《激流三部曲》高觉新的悲剧命运
现代简约美式风格在室内家装中的运用
中国传统元素在游戏角色...
江苏省某高中学生体质现状的调查研究
高警觉工作人群的元情绪...