自动物料分拣机器人控制系统设计+Matlab源程序+图纸(2)
Key words: Virtual Prototyping;neural network; PID parameter control ;Hebb
1. 研究背景介绍1
1.1 自动物料分拣机器人控制系统简介1
1.2 控制系统的方案…2
1.3 虚拟样机的建模…4
2. 中心控制器…8
2.1.PID控制原理 8
2.2.直流伺服电机建模8
2.3.PID控制伺服电机仿真10
2.4.人工神经网络技术12
2.4.1.人工神经网络的介绍 12
2.4.2.人工神经网络和PID相结合…13
2.4.3.M-P模型 13
2.4.4学习规则 15
2.4.5感知器的图形解释16
2.5常规PID控制 18
2.7.单神经元整定 PID 参数…19
3.基于虚拟样机技术的控制系统建模及仿真…21
3.1单神经元模块… …20
3.2.速度环仿真及分析23
3.3.位置环的仿真和分析…23
4. 硬件 24
4.1.运动控制卡… 24
4.2.PC工控机 24
4.3.传感器25
4.4.编码器26
4.5.I/O卡 … 26
结论… …27
谢辞… …28
参考文献29
1. 研究背景介绍
1.1. 自动物料分拣机器人控制系统简介
自动物料分拣机器人的驱动主要是由三个直线驱动单元加上控制系统与末端执行器组成。为了让机器手能够做到灵活的动作与反应的快速,需要给系统设计出一个中心控制器。控制器主要负责对获得的各种信息进行处理,而且要依据系统本体模型加上环境模型再加上控制程序做出相应的决策,并完成特定的工作。
传统的控制系统大部分都是基于计算机技术和控制理论建立的。跟随着应用的广泛使用和技术的不断发展,控制系统在与多媒体、信息交流、人工智能等很多学科相互结合,发展成为了今天的这种具有高可靠性、实时的响应处理、灵活多变的组配与扩展、很友好的人机界面再加上强大的通讯能力等很多优秀的特点,尤其特别适用于工业的生产。
而本设计中注重在只能控制系统的设计,将控制系统比作大脑的话那各部分硬件就详单与它的四肢而这些控制器多由6部分组成:“执行器”是控制系统对外界控制的输出端口,它是作用在外界对象的功能;“传感器信息处理”将传感器的信息进行适当的处理以后再加以识别和检测;“认知”主要的对传感器信息处理后的信息进行适当的分析,计划,策划,指令。“控制”是整个系统最核心的部分,它把收集到的认知的信息和任务进行规划最后产生实施有效的控制作用;“通行接口”则是将各个模块群补都结合起来的一个高速路。各个部分的相互作用如下图所示:
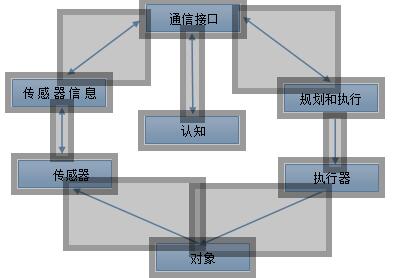
图1-1 智能控制系统框架图
其中传感器就是作为各个轴的极限位置的一个界限管理感知器,主要是保证机器人在工作环境的范围安全。执行器就是作为一个执行的环节来动作。
在控制系统构成的这一块儿,由于闭环控制可以做到根据系统的偏差量不停的修正被控制量,能够准确的对系统运行的情况更加真的及时的反馈和修正,提高整个系统运行的精度,综上考虑之后针对该课题的自动物料分拣机器人系统采用闭环控制。
1-2 闭环位置结构图
1.2. 控制系统的方案
自动物料分拣机器人的控制系统主要集中控制分拣机器的运动的速度和位置精度,本设计关联的课题是一个三轴的直角坐标机器人,其中对于直角坐标西的机器人的运动控制方式有接下里几种方案: