- 上一篇:基于HTTP-DM的网络隐蔽信道的设计与实现
- 下一篇:基于拉普拉斯分解模型的红外与微光图像融合的实现
2.3 静态电容及寄生电容检测实验 12
2.3.1 实验原理 12
2.3.2 实验设备 13
2.3.3 实验过程 13
2.3.4 实验结果 14
2.3.5 数据处理 16
2.3.6 实验问题和对实验结果的分析 19
2.4 CADENCE/Pspice模型建立 20
2.4.1 驱动电路的仿真 20
2.4.2 陀螺表头部分的建模 21
2.4.3 驱动检测电路建模 23
2.4.4 寄生电容的建模 23
2.4.5 电路总仿真图 24
3 模型参数的测试与实验 27
3.1 谐振器品质因数与谐振频率的实验测量 27
3.1.1 品质因数Q和谐振频率的理论求解 27
3.1.2 实验过程 29
3.1.3 实验数据处理 30
3.2 开环驱动试验与仿真的验证 32
结论 37
致谢 39
参考文献 40
1 绪论
1.1 研究背景
目前机电结合已成为现代仪器的发展主流,而微机械电子系统(Micro Electromechanical Sestem,MEMS)技术由于其体积小、功耗低的特点在军事与民用中得到了快速应用,现代战争越来越趋向于区域精确打击也使得MEMS技术在军事领域方面占据着越来越显著的作用。微机械电子系统利用微加工技术和集成电路技术把微传感器、微执行器、处理控制电路和接口、微结构、通信与电源集成在一块或者多块芯片上,而构成微型集成系统。
在现代高科技快速发展的时代,对于各类传感器等精密器件,MEMS传感器由于其体积小、重量轻、结构简单、可靠性好等特性受到更多领域的关注。利用MEMS技术,以微电子、微机械和材料科学为基础,可以将外界各类物理化学等信号输入微型传感器器件,然后通过微传感器转换成电信号,最后通过信号处理电路作用,使得微执行器得到执行功能。理想微机械电子系统的模型如下图1.1。
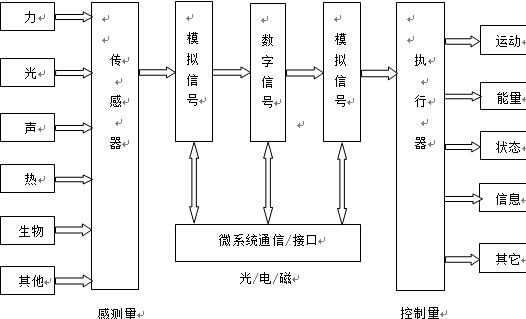
图1.1理想微机械电子系统的模型图
陀螺中包含驱动和检测两个主要的振动模态,在MEMS硅微音叉陀螺中实际的应用中,对陀螺微结构精度要求很高,而微机械制造工艺不够完善且存在相对误差较大,包括系统误差及陀螺驱动后产生的动态误差。在MEMS硅微机械音叉陀螺的制造过程中也会引入寄生参数(如由于封装材料所引入的分布电容等寄生电容),加工出的实际结构与理论设计值往往存在一定偏差,这些偏差导致陀螺的实际测量过程中产生许多问题。目前国内并没有对MEMS硅微音叉陀螺的梳齿电容结构及驱动结构建立完整的电学仿真模型,这使得对制造出来的陀螺的性能改进造成很大的阻碍,建立完整的MEMS硅微机械音叉陀螺的电学等效模型已经成为了目前研究如何改进陀螺性能所急需要解决的课题。因此以实验测试数据为依据,对加工好的陀螺仪表头进行重建模,得到更为准确的模型,这项工作对提高MEMS器件整体性能及改进制造工艺具有重要的意义,同时能更好的加强我国的国防力量。
1.2 课题背景及研究现状