matlab机械手的混合控制+文献综述(2)
参考文献32
第一章 绪论
1.1 引言
在科学技术和世界经济日新月异的飞速发展之下,于20世纪70年代诞生的机器人高端技术学科打开了人们认识机器人的大门,人们开始初步了解机器人的原理以及其应用。接下来的十几年中,伴随着控制方面的技术,计算机方面的科学技术以及半导体技术方面的学科以及传感技术和人工智能技术的不断深入发展和不断创新,新兴的机器人这门学科越来越成为了现代生活各个领域如工业,国防,军用,医疗,科学研究,甚至是人们的日常生活中不可或缺的前沿学科,倍受工业领域和学术界的高度重视。
控制理论和控制方法是机械手系统的控制核心。我们都知道,对于新兴的机器人学科而言,它是近年来得到飞速发展的涉及到计算机科学技术、人工智能学科研究、自动控制技术方法的一门综合性很强的,综合了多种学科知识的新兴技术。
人们对于机器人的研究经历了一下三个重要的阶段:第一,示教型机器人;第二,感知型机器人;第三,智能型机器人[1] 其中,智能型机器人采用的人工智能控制技术是近年来机器人控制领域中的前沿课题,在众多科学家的研究下已经取的了十分丰硕的成果。
空间机器人作为智能机器人学科的一个重要的分支,在机器人技术控制领域的研究成果之下,空间机器人的发展和应用取得了空前的飞速突破,成为机械化,自动化生产过程中使用的一种具有移动和抓取工件功能的设备装置。机械手系统作为空间机械人最重要的模块,充分实现了机械化和自动化的完美有机结合,在减轻人力劳动强度,改善技术人员工作条件,提高机器自动化程度,降低工作环境危险指数等方面发挥着越开越不可或缺的作用。
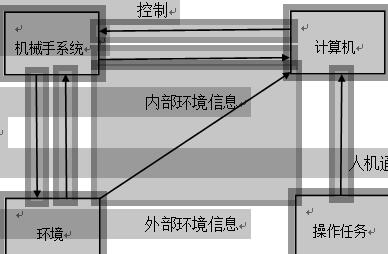
图 1-1机械手系统结构控制原理图
1.2机械手系统基本概念
机械手也就是我们常说的自动手,它具有形象地模仿人类手臂的动作各种的功能,在生产和生活中常常被用来按照一定的程序来搬运、抓取对象或者操作工具的自动装置【4,6】。
机械手系统的组成大体上可分为3个部分:手部、运动机构和控制系统【1】。
手部是机械手系统用来抓持物件的装备,它具有托住、吸附型以及夹持型等生产和生活中比较常用结构形式。而采用何种结构形式作业,主要是根据对象的尺寸,重量,形态以及材料和工艺要求来决定的。
运动机构,它使手部完成各种转动(摆动)、移动或复合运动来实现计划的动作,改变被抓持物件的位置和姿势。它可以由传感器来检测机器人的自身状态(内部信息),如关节的运动状态等来调整自身的运动过程。
控制系统是整个机械手系统的核心部件,可以通过控制机械手系统每个自由度上面的电机,来使机械手实现固定的动作。根据控制运动的形式可以分为点位控制和连续性轨迹控制。
1.3机械手的分类
按照自由度来划分可分为:二文自由度机械手,三文自由度机械手,四文自由度机械手,五文自由度机械手,优尔文自由度机械手等等。
按照结构形式来划分可分为:双关节机械手系统,多关节机械手系统,直角坐标系机械手系统,极坐标系机械手系统以及柱坐标系机械手系统等等。
按照控制方式的不同可以划分为:伺服控制机械手系统,非伺服控制机械手系统。
按照驱动方式可以划分为:电动式机械手系统,气动式机械手系统以及液压式机械手系统。
按照控制方法的不同可以划分为:单一控制机械手,混合控制机械手。