玩具箱玩具柜关闭件试验机(机械手)设计(2)
1.2 典型工业机械手:装配线机械手的构成
装配线机械手在多数情况下是这样定义的:在工业生产的装配生产应用领域中的,一种能代替人完成装配﹑自动控制的多功能﹑多自由度工业机器人。它的整个结构常常由执行机构﹑驱动部分﹑控制系统等部分组成[4]。
1.2.1 执行机构
执行机构是能够完成各种动作的部件的总称,基本包括以下几个部分:
1、 手部:直接或(通过垫板等)间接与工件接触的部分,根据实际要求,机械手手部往往设计成快换式,这样就可以根据不同装配的要求,更换不同手爪,从而圆满地完成不同形状工件的装配任务。
2、 腕部:机械手中,进行手部和臂部连接,确定手部工作位置和臂部运动空间的部件,用来调整所抓取物体的动态及方位。
3、 臀部:支撑抓取工件的手部及腕部位置的重要部件,它带动手部和腕部去抓取目标工件,并按预定的要求,将其搬运到指定地点。
4、 腰部(即机身):支撑整个机械手所有部分的最基础的部件,它还可以定位和固定驱动装置及其它装置的部件[5]。
在整个装配线机械手的执行机构中,腕部和臂部是极其重要的部件,它一般由旋转运动和往复直线运动的机构组成,结构形式可根据实际情况,进行各种变化[6]。一般来说,一个拥有3~6个自由度的机械手,就已经能适应多个场合,多种任务的作业要求了。
装配线机械手所握持的零件在空间的位置是由机械手的臂部﹑腕部以至腰部等各部分独立运动结果的合成来确定的。它的运动范围是机械手在二文或三文空间的所能到达位点的集合,是机械手的主要技术参数之一[7]。
1.2.2 驱动部分
驱动部分是执行机构各部分工作时,为其提供动力的能量装置,根据动力源的不同,驱动系统可分为气动﹑液动﹑电动﹑机械式四种形式。根据试验机设计要求和各形式驱动系统的特点点,本试验机设计采用电动驱动系统,省力,安全,清洁,经济可行性高[8]。
1.2.3 控制系统
控制系统是通过编写程序等指挥驱动部分,让执行部分按照预期的动作进行运动。在精度要求很高的系统中,往往需要通过位置检测,加速度等信息的反馈,来调整装配工作的位置、加速度输出,从而保证机构能快速、准确地响应装配线机械手运动的控制[4]。
下图是一般机器人的组成:
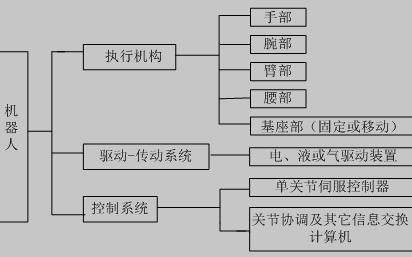
图1.1 机器人的一般组成
1.3 机械手在生产中的应用
从第一台工业机械手出现(1985年由美国联合控制公司研制)到现在,机械手技术历经三十多年的发展,不断提高着机械手技术水平。同时,相关学科也快速兴起,这无疑更促进了机械手在各领域的应用[9]。
机械手技术的延伸,对扩展人类的生存空间有着重要作用,它能代替人类在有毒﹑高温﹑高压﹑辐射等特殊的环境中完成工作,甚至进行人无法直接触及的空间范围探索的工作,是人类不可或缺的工具和帮手,对人类社会的进步和工业生产有着举足轻重的作用[10]。
到目前为止,世界各国已研制出各种各样可进行不同应用的机械手。轿车零件制造机械手﹑发动机检验机械手﹑电子产品生产装配线机械手等行业,均有着机械手的身影。其中应用最多的便是机械产品制造领域中的装配线机械手,例如:船舶制造业﹑汽车制造业﹑航天制造业﹑精密仪器制造业﹑通用机床制造业等[11]。
我国工业机器人事业起步晚,工业机器人技术的发展受到很大限制。目前,我国已开始有计划地引进从先进的国外工业机器人技术,通过不断地引进、仿制、改造、创新,我国的工业机器人技术正在快速地发展着[12]。
上一篇:链辊式压榨机设计+文献综述