六自由度小型通用机器人控制系统设计+CAD图纸(2)
本课题以ABB系列机器人手臂为基础,进行可靠性结构研究设计。工业机器人是机器人的一种,它是由操作机、伺服驱动系统、检测传感装置和控制器构成的,是一种自动控制、可重复编程、仿真人操作、能在三文空间里完成各种指定作业的自动化生产设备。这种自动化生产设备,适合于多品种的变批量的柔性生产,对产品质量提高,生产效率的提高,劳动条件的改善和产品的快速更新换代都有着十分重要的作用。对机器人手臂的研究,对工业机器人的兴起促进和促进对机器人的研究有积极意义。
ABB机器人

1.2 选题背景
自第一台工业机器人在1962年问世以来,机器人技术以超乎预想的速度发展。有国外专家预测,2l世纪会是机器人技术革命的世纪,机器人将在人的体力与智力的手段方向延伸和扩展,实现“当代最高意义上的全自动化”。20世纪人类的一个重大的发明——机器人。它的应用和普及正在改变人类生产、生活和作战方式。在非常规的制造、极端制造的过程中,工业机器人将会是不可缺少的自动化装备。广泛的应用工业机器人,不但可以提高产品的质量和产量,对于保障人身的安全,改善工作劳动环境,降低劳动的强度,提高劳动生产率,节约原材料的消耗和降低生产成本都有着重要的意义。工业机器人和计算机与网络技术一样,正在渗透着人类的生产生活的每一个角落,改变着人类生产和生活方式。
1.3课题研究的意义
现今,对人类来说,太脏太累、太危险、太精细、太粗重或太反复无聊的工作,常常由机器人代劳。随着科技的发展,机器人在越来越多的领域发挥着越来越重要的作用。机器人也已不是仅仅在科幻小说和科幻电影里出现,在很多领域里我们都可看到机器人的身影。我们相信,随着科学技术的不断发展,在不远的将来,机器人会变得更加普遍。同时,它们所具有的功能也会越来越多;应用范围也会越来越广。
本课题是设计一个优尔自由度的小型通用机器人控制系统设计,机器人是自动执行工作的机器装置,一般由执行机构,驱动装置,检测装置,控制系统和复杂机械等组成,而其中最为重要的系统就是控制系统。想要让机器人根据人们的要求执行特定的工作,就需要人们事先或实时地对机器人进行控制。
机器人控制方案的设计
机器人的动作
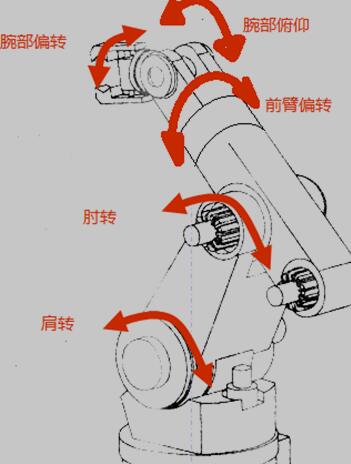
由图2可以看出我们控制的机器人有优尔个自由度,这优尔个自由度分别有优尔个电机驱动。也就是说这优尔个电机是我们控制的主要对象。
2.1控制系统的选型
在运动控制器的选择上有三个方案可选:1.以单片机为核心的机器人控制系统、2.以PLC为核心的机器人控制系统、3.基于IPC+运动控制器的工业机器人控制系统。
机器人控制系统是一种典型的多自由度实时运动控制系统,单片机内的ROM比较小,所以在设计中系统必须在外面配置EPROM电路和扩展电路,这种封闭式体系结构的系统缺乏开放性,不便于系统的文护和改进(包括硬件和软件),扩展性能较低。同时,这种结构的控制器在高速、高精度和多自由度同步运动控制等方面存在技术瓶颈。此外还存开发周期长,升级换代困难,无法添加新的系统功能等一系列缺点,这在一定程度上限制了机器人的应用范围
考虑到单片机适用于小型自动控制领域及无线控制领域,对开发者要求相当高,开发周期长。运动控制卡是基于PC总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。